
بسیاری از گیرنده های امروزی ترکیبی هستند به این معنی که میتوانند اطلاعات را از برخی یا همه سیستم هایی که بالا اشاره کردیم دریافت کنند و پوشش دهی بهتر و دقیق تری ارائه دهند.
بسیاری از گیرنده های امروزی ترکیبی هستند به این معنی که میتوانند اطلاعات را از برخی یا همه سیستم هایی که بالا اشاره کردیم دریافت کنند و پوشش دهی بهتر و دقیق تری ارائه دهند.

یک VTOL (vertical take-off and landing) هواپیمایی است که میتواند به صورت عمودی پرواز کند و فرود بیاید.در واقع VTOL ترکیبی از هواپیما و مولتی روتور است.طبقه بندی VTOL میتواند شامل رنج گسترده ای از هواپیماها مانند بال ثابت، هلیکوپتر ها و…شود.برخی هواپیماهای VTOL میتوانند در مدل های مختلفی مانند CTOL(برخاست و فرود معمولی )، STOL (برخاست و فرود کوتاه) و STOVL (برخاست کوتاه و فرود عمودی) دسته بندی شوند.
هواپیماهایی با پرواز ترکیب شده که معمولا VTOL نامیده میشوند، هنگامی محبوبیت پیدا میکنند که بخواهیم سرعت و بازده یک هواپیمای بال ثابت را با خصوصیت عمود پروازی مولتی روتور ها ترکیب کنیم.مولتی روتور ها و هلی کوپتر ها به دلیل نیاز به تولید تراستی بیشتر از وزن وسیله، بازده کمتری دارند در حالی که نرخ تراست هواپیماهای بال ثابت کمتر از۱ است و تراست کمی دارند.علاوه بر این،هواپیمای بال ثابت میتواند بسیار سریع تر و بدون همه اشکالاتی که به مولتی روتور وارد میشود پرواز کند.درعوض مولتی روتور میتواند در هر جایی پرواز کند بدون اینکه نیاز به باند فرود داشته باشد.
VTOL ها بسیار جامع و دارای انواع مختلفی میباشند که ما به توضیح برخی میپردازیم.
ادامه در سایت:
http://golabirobat.com/vtol-introduction/

ملخ روی سیستم شما دوکار اصلی دارد: تولید تراست و گشتاور
تراست نیروی به سمت پایینی است که با جابه جابی هوا در اثر حرکت ملخ به وجود می آید.اگر، در هر لحظه، فشار خالص رو به پایین از هر چهار طرف ملخ ، بیشتر از وزن کوادکوپتر باشد، کوادکوپتر به سمت بالا خواهد رفت.اگر این مقدار با وزن کوادکوپترتان مساوی باشد، کواد شما معلق خواهد ماند.در ربات های پرنده، تراست،هر دو مسئولیت ارتفاع گرفتن از زمین و به جلو راندن را دارد.اکثر کوادکوپتر ها میتوانند تراست بیشتری از وزن ربات را تولید کنند.
ملخ اساسا تراست بیشتری با چرخش سریع تر ایجاد میکند.ملخ ها همچنین به شدت تحت تاثیر سرعت حرکت کوادکوپتر در هوا نیز هستند.برخی ملخ ها در حالی که کواد هنوز بلند نشده است چن تن تراست تولید میکنند اما مقدار آن در پرواز کاهش می یابد.برخی دیگر چند تن تراست در هنگام پرواز با سرعت بالا تولید میکنند در حالی که هنگام معلق ماندن تراست آن کاهش می یابد.درنهایت شما یک حالت تعادل بین این دو حالت میخواهید.یک ملخ که تراست خوبی را در rpm داده شده با توجه به اسپیدکنترل کوادکوپترتان تامین کند.
همچنین بازده مقدار تراستی است که یک ملخ میتواند با مقدار توان داده شده در سرعت سیر هوایی معلوم تولید کند. موتورهای بهتر و توان باتری بیشتر نیز در مقدار بهره تاثیر خواهد داشت.
گشتاور با زیاد کردن یا کم
کردن سرعت چرخش ملخ ها به وجود می آید.این یکی از بخش های حیاتی مولتی
روتور است زیرا عامل ایجاد حرکت در محور yaw است.گشتاور نتیجه مقاومت ملخ
ها در برابر افزایش یا کاهش سرعت است.شما میتوانید گشتاور ملخ را با
افزایش طول، افزایش تعداد ملخ ها، افزایش گام ملخ بیشتر کنید.



باتری های لیتیوم پلیمر یا اگر بخواهیم درست تر بیان کنیم،باتری lithium-ion polymer یک باتری قابل شارژ از تکنولوژی لیتیوم یون است که از الکترولیت پلیمری به جای الکترولیت مایع استفاده میکند . همانطور که می دانید باتری های لیتیوم پلیمر به دلیل قابلیت دشارژ با جریان بالا بصورت گسترده در ربات های پرنده مورد استفاده قرار می گیرند.

مشخصات یک باتری لیتیوم پلیمر:
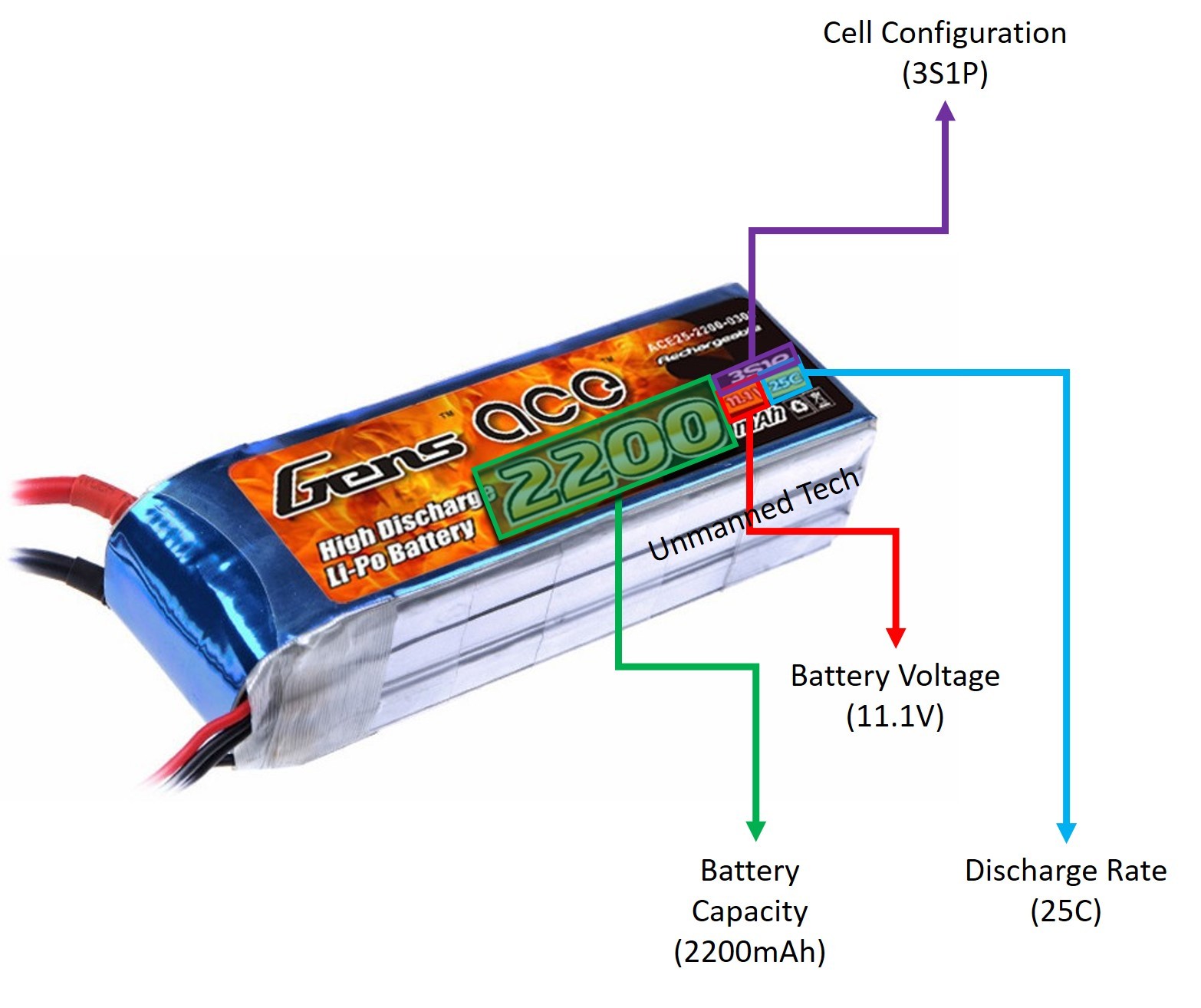
تعداد سلول: هر سلول یک باتری لیتیم پلیمر معمولا ۳٫۷ ولت اختلاف پتانسیل به شما میدهد. هر پکیج باتری لیتیم پلیمر شامل چندین سلول است که به صورت موازی به هم متصل میشن. در نتیجه یک باتری دو سلولی یا به شکل رایج ۲ سل ۷٫۴ ولت و یک باتری ۳ سل ۱۱٫۱ ولت برای شما فراهم میکند.
ظرفیت باتری: ظرفیت یک باتری مقدار بار الکتریکی هست که در ولتاژ نامی و در هر ساعت میتواند خروجی دهد. این عدد معمولاً با واحدهای A.h یا mA.h بیان میشود.
C-Rate : این عدد ضریبی هست که در ظرفیت باتری ضرب میشود و مقدار حداکثر جریانی که باتری میتواند خروجی بدهد را مشخص میکند. مثلا یک باتری ۱۶۰۰ میلیآمپر۳۰C میتواند حداکثر ۴۸ آمپر جریان به شما بدهد.
ماکزیمم ولتاژ شارژ:
باتری های لیتیوم پلیمر معمولا بر اساس تعداد سلول های ساختاریشان دسته
بندی میشوند.هر سل باتری لیتیوم پلیمردارای ولتاژ ۳٫۷v و قابل شارژ تا
حداکثر ولتاژ ۴٫۲v است. باتری ها را با ولتاژ ۳٫۷v نگهداری میکنند تا از
خطرات احتمالی آن در هنگام جابه جایی جلوگیری کنند.
توجه کنید در هنگام خرید با استفاده از دستگاه باتری چکر ولتاژ هر سل باتری
لیتیوم پلیمر خود را چک کنید که ۳٫۷v باشد تا از سلامت آن مطمئن شوید.بخش
فروش گلابی ربات این کار را برای مشتریان آنلاین خود به صورت خودکار انجام
میدهد.
مینیمم ولتاژ تخلیه:
ولتاژ مینیمم اثر زیادی در عمر باتری لیتیوم پلیمر شما دارد و در حالت کلی
بهتر است آن را بیشتر از ۸۰ درصد ظرفیتش تخلیه نکنید. اصولا این ولتاژ تا
۳٫۲v (تحت بار) قابل تعریف است اما به علت احتمال عدم بالانس در جریانهای
بالا،بهتراست که این مقدار بالاتر تنظیم شود. مثلا ۴۰۰۰میلی امپر ساعت از
یه باطری ۵۰۰۰ میلی امپر ساعت.
تاثیر پارامترC بر باتری های لیتیوم پلیمر:
تقریبا تمامی باتری های لیتیوم پلیمر یک مقدار ثابت C بر روی خود دارند که با نام ظرفیت تخلیه شناخته می شود .
پارامتر C نشان دهنده مقدار قابل تخلیه جریان به صورت مداوم و پیوسته و همچنین ایمن می باشد .
به عنوان مثال شما یک باتری ۵۰۰۰mAh با ظرفیت تخلیه ۳۵c را در نظر بگیرید .
۵۰۰۰mAh=5Ah
۵*۳۵=۱۷۵A
عدد ۲۵C نشان دهنده این است که این باتری می تواند به صورت پیوسته و ایمن با جریان ۱۷۵ آمپر تخلیه شود.
پس با توجه به موارد بالا دقت داشته باشید که به صورت پیوسته از باتری بالا
جریانی بیشتر از ۱۷۵ آمپر نکشید که موجب آسیب رسیدن به باتری می شود .
شارژرهای ارزان به علت عدم دقت کافی در اندازه گیری ولتاژ سل ها، میتوانند باتری را به سرعت خراب کنند.
اگر این باتری ها درست استفاده نشوند قابل اشتعال خواهند بود . پس بهتر است هنگام خرید باتری قبل از استفاده از آن و شارژ کردن آن نکات زیر را بخوانید:

اگر باتری لیتیوم پلیمر شما یکی از نشانه های زیر را دارد آن را شارژ نکنید:
• سوراخ شده یا آسیب دیده است
• متورم شده یا تغییر شکل محسوسی داشته است
• ولتاژ هر سل باتری شما کمتر از ۳٫۳v باشد.
• باتری را در کنار مواد اشتعال زا شارژ نکنید.
۱- باتری لیتیوم پلیمر نباید ضربه بخورد یا مستقیم زیر نور خورشید قرار بگیرد، هرکدام از این موارد میتواند باعث اتش گرفتن باتری شود. اگر باطری در اثر کرش یا سانحه ضربه بخورد بهترین حالت این است که باتری را از نظر ظاهری بررسی کنید که باد نکرده باشه و یا پوسته باتری زخم یا سوراخ نشده باشد. اگر باتری زخم یا سوراخ شده باشد امکان اتش سوزی خیلی بیشتر میشود بدلیل سوراخ شدن پوسته غیر قابل استفاده میشود .استفاده مجدد از این باطری کاملا خطرناک است و امکان دارد در شارژ اول باعث اتشسوزی شود.
۲- باتری لیتیوم پلیمر نباید متورم شده باشد، این بادکردگی ممکن است در اثر کشیدن جریان بیش از حد و یا اورشارژ باتری پیش آید که آن هم خطر اتش سوزی دارد.
۳- بیشترین احتمال خطر اتشسوزی در هنگام شارژ باطری وجود دارد، فرض کنید
شارژر شما خراب شود و باطری اورشارژ بکند، برای همین حتما از شارژر مرغوب و
با کیفیت استفاده کنید، شارژرتان باید حتما مخصوص باتری لیتیوم پلمیر باشد
و بتواند تعداد سل هارا بصورت اتوماتیک تشخیص بدهد.از شارژر های معمولی
برای لیپو استفاده نکنید، قبل از شارژ مطمئن باشید که تنظیمات شارژر رو
دقیقا طبق مشخصات باتری تنظیم کردید، محل شارژ هم باید ضد اتش و عایق باشد.
۴ – باطری لیپو برای محیط زیست بسیار مخربه و خطرناک، هیچوقت باطری رو با بفیه زباله های معمولی یکجا دور نریزید.
آناتومی باتری های لیتیوم پلیمر:
باتری لیتیوم پلیمر شما دارای دو کانکتور خواهد بود:
یک کانکتور بالانس و دیگری کانکتور T

| استفاده | تصویر | نوع کانکتور |
| برای بالانس کردن ولتاژ سل های باتری (همیشه ۱ سیم بیشتر از تعداد سل های باتری دارد) | 
|
کانکتور بالانس |
| برای شارژ و دشارژ باتری لیتیوم پلیمر و تامین کننده برق ربات پرنده شما | 
|
کانکتور T |
تست و مانیتورینگ باتری لیتیوم پلیمر:
دستگاه مانیتورینگ یا همان باتری چکر ولتاژ هر سل ازباتری را نمایش میدهد و
هنگامی که ولتاژ آن از حد مینیمم که به طور پیش فرض ۳٫۳ ولت است ، کاهش
پیدا کند بوق هشدار آن به کار میفتد.کاهش زیاد ولتاژ باتری آن را خراب و
غیر قابل استفاده میکند.شما میتوانید این تنظیمات را بین ۲٫۷V و ۳٫۸V تغییر
دهید ولی پیشنهاد میشود از همین تنظیمات پیش فرض استقاده کنید.

برای استفاده از باتری چکر ابتدا سیم زمین از کاکنتور بالانس باتری خود را پیدا کنید که اولین سیم مشکی آن خواهد بود(دورترین سیم از سیم قرمز).آن را به کمترین مقدار نوشته شده پشت باتری چکر متصل کنید.مثلا برای باتری ۳ سل سیم قرمز روی علامت ۳S پشت باتری چکر وصل میشود.

هنگامی که باتری چکر را متصل کردید،صدایی ایجاد خواهد کرد:
بوق ممتد: نشانه این است که باتری دارای حداکثر ولتاژ خود است و به طور کامل شارژ شده است.
۱-بوق نشانه شارژ کامل سل اول از باتری لیتیوم پلیمر ۲-بوق شارژ کامل سل دوم باتری و … به همین نحو ادامه دارد.
شارژ کردن باتری لیتیوم پلیمر:
۱-باتری خودرا به شارژر متصل کنید:

۲-کانکتور بالانس باتری را با توجه به تعداد سل های باتری به پورت مناسب از قسمت بالانسر شارژر متصل کنید.

۳-دکمه batt.type را فشار داده تا به نوع باتری لیتیوم پلیمر برسید
وenter را فشار دهید (این گزینه انواع باتری های قابل شارژ با این شارژر را
نشان میدهد):
PROGRAM SELECT
LiPo Batt
۴-دکمه Inc.button را فشار دهید تا در صفحه نمایشگر گزینه زیر نمایش داده شود:
LiPo Balance
۵- گزینه جریان شارژ شروع به چشمک زدن خواهد کرد.تنظیمات این قسمت به
مدل باتری شما بسمگی دارد.برای مثال باتری لیتیوم پلیمر با مشخصات ۱۱٫۱v
2200mAh شارژ با جریان ۲٫۲A پیشنهاد میشود(بستگی به پیشنهاد کارخانه تولید
کننده باتری دارد).
از دکمه های dec وinc برای تغییر مقدار جریان شارژ استفاده کنید.بعد از
تعیین مقدار آن دکمه enter را بزنید. در این مرحله ولتاژ شارژ باتری را
انتخاب خواهیدکرد.این مقدار با مقدار نوشته شده روی باتری شما یکی خواهد
بود مثلا برای باتری ۳ سل آن را روی ۱۱٫۱v تنظیم میکنید.
پس از آن با نگه داشتن دکمه enter مشخصات باتری چک میشود:
BATTERY CHECK
WAIT…
باتری شروع به شارژ خواهد کرد.
بر خلاف تصور مردم کاربرد هواپیماهای بدون سرنشین یا پهپاد ها تنها موارد نظامی و یا عکاسی که می شناسیم نیستند و آن طور که به نظر میرسد تنها برای کار های نظامی و امنیتی ساخته نمیشوند. بسیاری از علاقه مندان به این صنعت نوین این پهپاد های موسوم به مولتی روتور را به چالش می کشند که البته مهارت بالایی نیز در پرواز و کنترل شدن دارند. امروزه با توجه به پیشرفت هایی که در این صنعت صورت گرفته کاربردهای بیشتری از ربات پرنده مد نظر است و مهندسان زیادی برای تحقق اهداف موردنظر در تلاش هستند.
از جمله کاربردهایی که میتوان برای پهپادها در نظر داشت:
قابلیت حمل کالا که اکنون جزء به روز ترین کاربردهای مولتی روتورها است و چالش های زیادی را با خود به همراه دارد.امروزه شرکت آمازون که برای همه ما نام آشناست سفارش های خود را با مولتی روتور حمل کالای خود تحویل میدهد.در ایران نیز شرکت بزرگ دیجی کالا با برگزاری مسابقات حرفه ای در تلاش است تا این امر را در کشور خودمان به اجرا برساند.

امدادرسانی در مناطقی که امکان عبور آمبولانس های اورژانس نیست و یا حتی از لحاظ سرعتی نیز ربات پرنده سریع تر به محل مورد نظر میرسد،برای هر پایگاه هلال احمر میتوان یک مولتی روتور در نظر گرفت.

نقشه برداری هوایی از اراضی با مساحت بزرگ و جاده و راه ها که امروزه به صورت زمینی با زحمت و زمان زیادی انجام میگیرد.

تصویر برداری از مناطق صعب العبور،بازرسی خطوط انتقال نفت یا کابل های برق و بسیاری کاربرد های دیگر که همگی مستقل از کاربردهای نظامی هستند و هیچ خطری ندارند.

مالکیت خواهی کوادکوپتر در سال های اخیر رشد فزاینده ای یافته و این موضوع اداره فدرال هوانوردی آمریکا FAA را مجبور کرده است که سال به سال قوانین جدیدی را در محدود سازی استفاده از این پهپادها بکار گیرد چرا که جرایم و همینطور خطراتی که این پهپادهای برای جان انسان دارند غیر قابل انکار است مثلاً یکی از این قوانین پرواز در زیر ارتفاع ۵۰۰ فوتی است یا بکار گیری این هواپیماها در فضای پارک های ملی آمریکا، که آنهم ممنوع است. اما همچنان فضاهای باز خارج از شهرها برای تست و به پرواز درآوردن این پهپادها وجود دارند و جالب است بدانید مالکان این پهپادها در آمریکا از طریق ارتباط رادیویی باشگاه RC که راه انداخته اند، فضاهای دنج پهپادبازی! را با یکدیگر به اشتراک می گذارند.
وجود قوانین خوب در این حوزه به طوری که مانع پیشرفت کشور در مقایسه با سایر کشورها و محدودیت علمی و عملی فعالان این حوزه نگردد و هم چنین وجود زمین های پروازی برای مسابقه و تست و تمرین علاقمندان که از خطرات احتمالی جلوگیری میکند،موجب رشد و بهبود تصور عموم مردم نسبت به این صنعت میگردد.


آشنایی با انواع پرنده های بدون سرنشین:
پرنده های بدون سرنشین (UAVs ( Unmanned Aerial Vehicles همانگونه که از نامشان پیداست برای پرواز و پیمایش مسیر و انجام ماموریت های محوله نیازی به سرنشین و خلبان ندارند و از راه دور کنترل می شوند. این پرنده ها قابلیت پرواز و ناوبری به دو صورت تمام خودکار و دستی و در هر دو حالت قابلیت نظارت و کنترل از ایستگاه زمینی را دارا می باشند .
این پرنده هادر سه کلاس:
🔍بال ثابت Fixed wings
🔍مولتی روتور Multi Rotors
🔍و ( VTOLs (Vertical Take Off & Landing
مولتی روتورها که از نظر نوع کارکرد در دسته بندی هلی کوپتر ها قرار می گیرند. این پرنده های بدون سرنشین که از سال 1920 متولد شده اند تا به امروز سیر تکاملی پرفراز و نشیبی را طی کرده اند. اولین نمونه این پرنده ها در کلاس کوادکوپتر ابتدا در فرانسه و همزمان توسط دانشمند دیگری در آمریکا و برای کاربرد نظامی در نیروی هوایی ارتش ایالات متحده پا به عرصه حضور گذاشتند. پس از گذشت دوسال نمونه نظامی این پرنده توانست با 1دقیقه و 40 ثانیه زمان پروازی تا ارتفاع 1.80 متری بالا آمده و نتیجه ای نه چندان خوشایند را به ثبت رساند ولی نمونه فرانسوی در بار اول با صرف دوسال زمان به هیچ نتیجه ای نرسیده و پس از چهار سال تلاش و تغییر در طراحی موفق شد رکورد 360 متر طی مسافت توسط هلی کوپتر را با ثبت 520 متر طی مسافت بهبود بخشید.
امروزه شاهد پیشرفت فوق العاده این پرنده ها و گسترش کاربرد آن ها نه تنها در زمینه های نظامی از قبیل گشت زنی هوایی ، شناسایی و حمل سلاح و... بلکه در زمینه های تصویر برداری هوایی، نقشه برداری هوایی، حمل بار، امداد و نجات و .... کاربرد فروان دارند، هستیم.
مزیت قابل توجه مولتی رو تورها نسبت به پرنده های بال ثابت قابلیت عمود پرواز بودن آنهاست که نیازی به باند برای صعود و فرود نداشته و همچنین مزیت این پرنده ها نسبت به هلی کوپتر نیز استفاده از تعداد موتورهای بیشتر است که مکانیزم کنترل را بهبود می بخشد.
چند موتوره ها یا مولتی روتور ها از جمله پرنده های عمود پروازی هستند که بیش از دو موتور برای حرکت به سمت بالا دارند . مولتی روتور ها در انواع و سایز های مختلفی طراحی و ساخته می شوند که شامل تری کوپتر ( دارای 3 موتور ) ، کواد کوپتر ( دارای 4 موتور ) ، هگزا کوپتر ( دارای 6 موتور ) و اوکتا کوپتر (دارای 8 موتور ) هستند و حتی قابلیت ارتقا به بیش از 8 موتور و کنترل از طریق کنترل کننده های پیشرفته را نیز دارند . در نتیجه این گفتار میتوان گفت که مولتی روتور یک نام کلی و عام برای پرنده های چند موتوره عمود پرواز بدون سرنشین است که دسته های مختلفی در ذیل این تعریف می گنجند .


یکی از پرکاربردترین وسائل در انجام انواع پروژه های هوافضا سیستم کنترل سرعت (ESC) می باشد. این سیستم که در هواپیماهای مدل پروازی، هلیکوپترها، هاورکرافت، قایق و ... که برای سرگرمی و به صورت پروژه ی خانگی ساخته می شوند، کاربرد دارد.
به صورت کلی در هر جایی که از گروه موتورهای براش لس (که قبلا در بخش موتورها توضیح آن داده شده) و سیستم رادیوکنترل استفاده شود باید از این سامانه استفاده کرد تا بتوان سرعت موتور را کنترل کرد.
ESC که مخفف electronic speed control می باشد، از گیرنده ی رادیوکنترل پالس ها را دریافت می کند و با توجه به کد مربوطه میزان جریان خروجی که به موتور می رود و در نهایت دور موتور (RPM) را کنترل می کند.
اسپید کنترل بر حسب اندازه و طول پالس ها کار می کند و به همین دلیل آن را (PWM) می نامند، که مخفف Pulse Width Modulation به معنای مدلاسیون پهنای باندهاست. در شکل زیر نحوه ی قرارگیری سیستم را می بینید.

اکثر ESC های جدید توانایی کنترل و مدیریت جریان باتری ها (BEC) را نیز دارند به طوری که دیگر نیاز نیست تا به گیرنده باتری دیگری برای تامین برق گیرنده و سرورها وصل شود و خود ESC می تواند این کار را انجام دهد و کافی است تا باتری به ESC وصل شود و آن نیز به گیرنده متصل گردد. سیستم power cut-off نیز در ESC ها وجود دارد که به معنای آن است که اگر ولتاژ از حد خاصی کمتر شد گاز موتور را قطع می کند تا دیگر به باتری آسیب نرسد. زیرا باتری های Li-Po بسیار به افت ولتاژ حساس هستند و اصولا با این اتفاق کارایی خود را از دست می دهند.
اسپید کنترل ها از سامانه های مختلفی برای امنیت بیشتر پرواز یا افزایش قابلیت هایشان بهره می برند که بسته به مدل و شرکت سازنده متفاوتند. طبیعتاً این قابلیت ها در اطلاعاتشان ثبت شده و اختلاف قیمتی آن ها به همین دلیل است.



فروش موتور براشلس،اسپیدکنترل موتور براشلس،فلایت کنترل،رادیو کنترل،باتری لیتیوم پلیمر،شارژر باتری لیتیومی،ملخ،فرستنده گیرنده
فروش انواع قطعات ربات پرنده برای کوادروتور ،هگزاکوپتر ، هلیکوپتر ، fpv، تصویربرداری هوایی ، اکتاروتور
لوازم جانبی مکانیکی برای ساخت پرنده مانند لوله کربن ، ورق کربن ، اسپیسر ، قفل بازو
لوازم جانبی الکتریکی مانند سیم با قطرهای مختلف ، سوکت ، رگولاتور ، برد تقسیم ولتاژ
انواع عینک های fpv برای مسابقات ربات پرنده
انواع فریم ها برای مولتی روتور های کوادکوپتر ، هگزاروتور ، اکتاروتور
تماس با ما:
تلفن: ۴۴۳۹۳۷۳۹-۰۲۱
همراه: ۰۹۱۲۵۴۸۶۱۵۸
همراه:۰۹۱۲۳۰۹۲۷۳۰
همراه:۰۹۱۲۵۷۶۶۱۱۲
پست الکترونیکی : info@golabirobat.com