باتری های لیتیوم پلیمر یا اگر بخواهیم درست تر
بیان کنیم،باتری lithium-ion polymer یک باتری قابل شارژ از تکنولوژی
لیتیوم یون است که از الکترولیت پلیمری به جای الکترولیت مایع استفاده
میکند . همانطور که می دانید باتری های لیتیوم پلیمر به دلیل قابلیت دشارژ
با جریان بالا بصورت گسترده در ربات های پرنده مورد استفاده قرار می گیرند.

مشخصات یک باتری لیتیوم پلیمر:
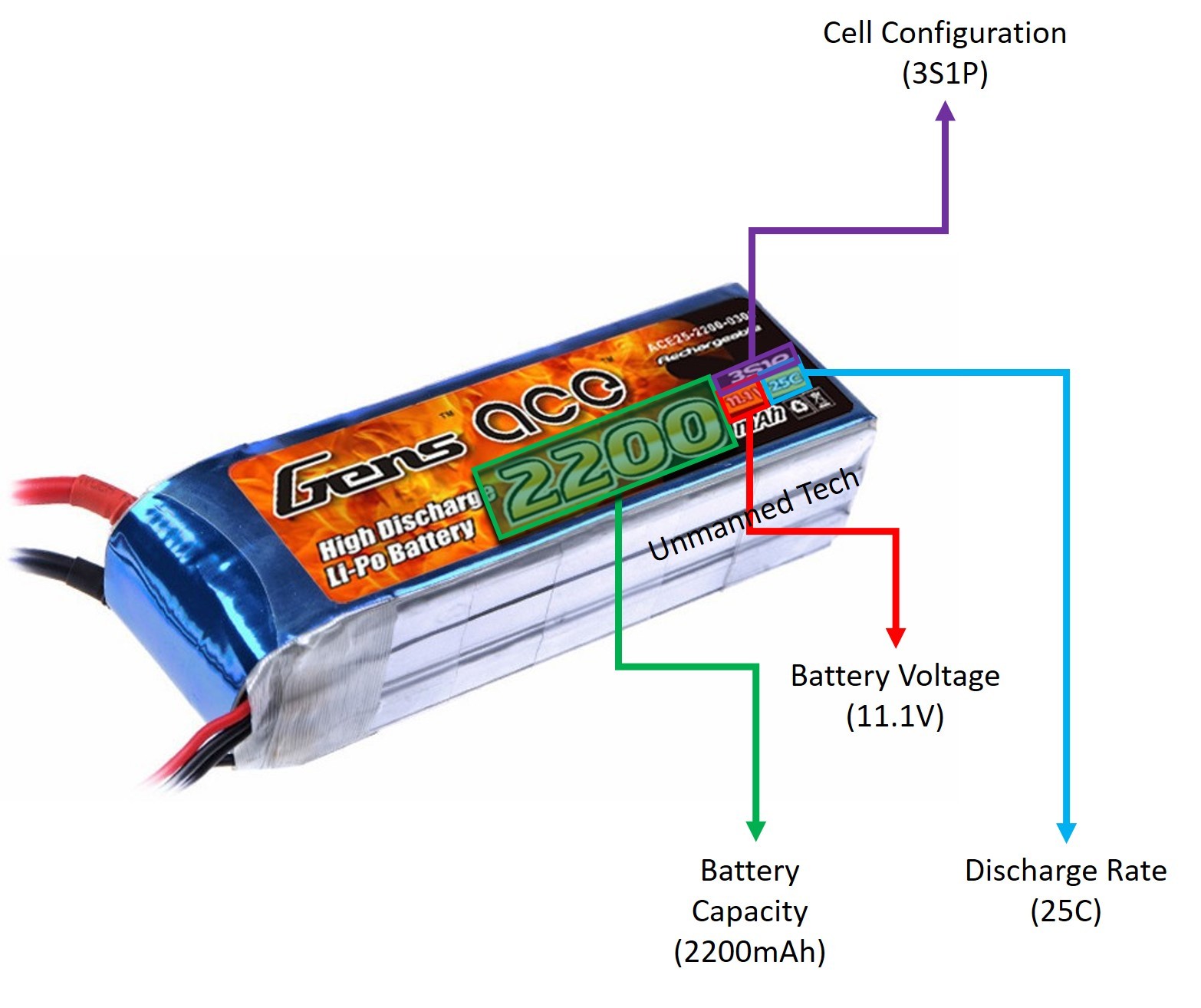
تعداد سلول: هر سلول یک باتری لیتیم پلیمر معمولا ۳٫۷ ولت اختلاف
پتانسیل به شما میدهد. هر پکیج باتری لیتیم پلیمر شامل چندین سلول است که
به صورت موازی به هم متصل میشن. در نتیجه یک باتری دو سلولی یا به شکل
رایج ۲ سل ۷٫۴ ولت و یک باتری ۳ سل ۱۱٫۱ ولت برای شما فراهم میکند.
ظرفیت باتری: ظرفیت یک باتری مقدار بار الکتریکی هست که در ولتاژ نامی و
در هر ساعت میتواند خروجی دهد. این عدد معمولاً با واحدهای A.h یا mA.h
بیان میشود.
C-Rate : این عدد ضریبی هست که در ظرفیت باتری ضرب میشود و مقدار
حداکثر جریانی که باتری میتواند خروجی بدهد را مشخص میکند. مثلا یک باتری
۱۶۰۰ میلیآمپر۳۰C میتواند حداکثر ۴۸ آمپر جریان به شما بدهد.
ماکزیمم ولتاژ شارژ:
باتری های لیتیوم پلیمر معمولا بر اساس تعداد سلول های ساختاریشان دسته
بندی میشوند.هر سل باتری لیتیوم پلیمردارای ولتاژ ۳٫۷v و قابل شارژ تا
حداکثر ولتاژ ۴٫۲v است. باتری ها را با ولتاژ ۳٫۷v نگهداری میکنند تا از
خطرات احتمالی آن در هنگام جابه جایی جلوگیری کنند.
توجه کنید در هنگام خرید با استفاده از دستگاه باتری چکر ولتاژ هر سل باتری
لیتیوم پلیمر خود را چک کنید که ۳٫۷v باشد تا از سلامت آن مطمئن شوید.بخش
فروش گلابی ربات این کار را برای مشتریان آنلاین خود به صورت خودکار انجام
میدهد.
مینیمم ولتاژ تخلیه:
ولتاژ مینیمم اثر زیادی در عمر باتری لیتیوم پلیمر شما دارد و در حالت کلی
بهتر است آن را بیشتر از ۸۰ درصد ظرفیتش تخلیه نکنید. اصولا این ولتاژ تا
۳٫۲v (تحت بار) قابل تعریف است اما به علت احتمال عدم بالانس در جریانهای
بالا،بهتراست که این مقدار بالاتر تنظیم شود. مثلا ۴۰۰۰میلی امپر ساعت از
یه باطری ۵۰۰۰ میلی امپر ساعت.
تاثیر پارامترC بر باتری های لیتیوم پلیمر:
تقریبا تمامی باتری های لیتیوم پلیمر یک مقدار ثابت C بر روی خود دارند که با نام ظرفیت تخلیه شناخته می شود .
پارامتر C نشان دهنده مقدار قابل تخلیه جریان به صورت مداوم و پیوسته و همچنین ایمن می باشد .
به عنوان مثال شما یک باتری ۵۰۰۰mAh با ظرفیت تخلیه ۳۵c را در نظر بگیرید .
۵۰۰۰mAh=5Ah
۵*۳۵=۱۷۵A
عدد ۲۵C نشان دهنده این است که این باتری می تواند به صورت پیوسته و ایمن با جریان ۱۷۵ آمپر تخلیه شود.
پس با توجه به موارد بالا دقت داشته باشید که به صورت پیوسته از باتری بالا
جریانی بیشتر از ۱۷۵ آمپر نکشید که موجب آسیب رسیدن به باتری می شود .
شارژرهای ارزان به علت عدم دقت کافی در اندازه گیری ولتاژ سل ها، میتوانند باتری را به سرعت خراب کنند.
اگر این باتری ها درست استفاده نشوند قابل اشتعال خواهند بود .
پس بهتر است هنگام خرید باتری قبل از استفاده از آن و شارژ کردن آن نکات
زیر را بخوانید:

اگر باتری لیتیوم پلیمر شما یکی از نشانه های زیر را دارد آن را شارژ نکنید:
• سوراخ شده یا آسیب دیده است
• متورم شده یا تغییر شکل محسوسی داشته است
• ولتاژ هر سل باتری شما کمتر از ۳٫۳v باشد.
• باتری را در کنار مواد اشتعال زا شارژ نکنید.
۱- باتری لیتیوم پلیمر نباید ضربه بخورد یا مستقیم زیر نور خورشید قرار
بگیرد، هرکدام از این موارد میتواند باعث اتش گرفتن باتری شود. اگر باطری
در اثر کرش یا سانحه ضربه بخورد بهترین حالت این است که باتری را از نظر
ظاهری بررسی کنید که باد نکرده باشه و یا پوسته باتری زخم یا سوراخ نشده
باشد. اگر باتری زخم یا سوراخ شده باشد امکان اتش سوزی خیلی بیشتر میشود
بدلیل سوراخ شدن پوسته غیر قابل استفاده میشود .استفاده مجدد از این باطری
کاملا خطرناک است و امکان دارد در شارژ اول باعث اتشسوزی شود.
۲- باتری لیتیوم پلیمر نباید متورم شده باشد، این بادکردگی ممکن است در
اثر کشیدن جریان بیش از حد و یا اورشارژ باتری پیش آید که آن هم خطر اتش
سوزی دارد.
۳- بیشترین احتمال خطر اتشسوزی در هنگام شارژ باطری وجود دارد، فرض کنید
شارژر شما خراب شود و باطری اورشارژ بکند، برای همین حتما از شارژر مرغوب و
با کیفیت استفاده کنید، شارژرتان باید حتما مخصوص باتری لیتیوم پلمیر باشد
و بتواند تعداد سل هارا بصورت اتوماتیک تشخیص بدهد.از شارژر های معمولی
برای لیپو استفاده نکنید، قبل از شارژ مطمئن باشید که تنظیمات شارژر رو
دقیقا طبق مشخصات باتری تنظیم کردید، محل شارژ هم باید ضد اتش و عایق باشد.
۴ – باطری لیپو برای محیط زیست بسیار مخربه و خطرناک، هیچوقت باطری رو با بفیه زباله های معمولی یکجا دور نریزید.
















